Bluetooth通信がRaspberry Pi でできることが分かったのだが、Raspberry同士の通信ができると、色々な可能性が生まれるはずだ。
ということでもう一台Raspberry Pi を調達した。
 追加購入したのは、左側の小さい方である。
追加購入したのは、左側の小さい方である。
より正確にいうと、右が Rapberry Pi 3 B+ であり、左が Raspberry Pi Zero WH である。
Raspberry Pi Zeroというだけでは色々なモデルがあり、価格もかなり違う。一番安いのは600円+税程度で買えるのだが、BluetoothとWifiがなく、ピンもついていない。
しかし、今回は通信テストを行うということで約2000円のを入手した。
2つの最大の違いは、メモリの容量で、3B+は1GB、Zeroは500MBと半分しかない。
また、コネクタを省略したり、小さいタイプに変更になっている。
HDMIなのだが、ZEROのコネクタはminiタイプで、普通はmini-標準の変換アダプタが必要になる。
どちらも、おなじLinuxベースのOSを入れて動かせるので、普通にbluetoothの通信をすんなり行える。
技術屋さんが相手なら、それだけで十分なのだが、一般の人、お偉い人々には通信ができているのかどうか分からないので、何か分かりやすい具体的な物を作って示さないといけない。
ということで、こんなのを作ってみた。

左右のキャタピラを2つのモータを使って動かそうという訳である。
車体などはTAMIYAの工作キットで適当に組み上げてみた。
奥に立てかけてあるのが、DISOで入手した500円のUSBバッテリーである。
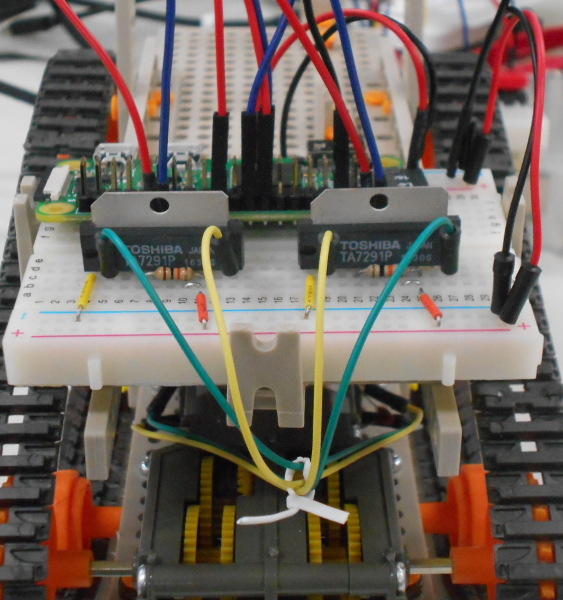
同じICが2つ見えるが、モータドライブと呼ばれるオモチャなどで良く使われている(本当は産業用にいっぱい使われている)DCモータの電源をコントロールするためのものである。これにより、左右のモータを回転を変え、前進、後退、右回転、左回転などをやってみた。
IC以外の部品は、抵抗が1つだけというシンプルな回路である。
駆動系(モータ及びモータドライバ)の電源は、下に見えるギアボックスの後に、単3乾電池4本の乾電池パックがあり、ブレッドボードの右下の角の赤と黒が乾電池からの電源ラインである。
信号系の導線は、ICの向こう側からそれぞれ2本入っていて制御している。
Raspberry Pi にはピンが40本あり、IOができるのだが、ON/OFF、つまりデジタルしかダメで、アナログが扱えないため、モータなどの実社会の物を動かすには何らかの方法でアナログに変換しないといけない
モータ制御系は、BLUE BACKSの『最新Raspberry Pi で学ぶ電子工作』の最後の章に従ったが、本の通信系はWebIOPiを用いた例になっており、Wifiによるネット接続で行っていたので、その部分は勝手にBluetoothに置き換えることにした。
IoTの部分はとても簡単である。プログラムにしろ、配線にしろ、すぐに終わる。
面倒なのは、メカの組み立て調整、配置などである。
ギアボックスは、最初は高速モードで組み立てたのだが、低速モード版に作り直した。
そして、一番手こずったのは、キャタピラのベルトの組み立てであった。
リモート制御の話は次回。

#人気の記事
#タグ